หน่วยเกียร์แม่นยำของหุ่นยนต์

ขนาด: RV-25N RV-42N RV-60N RV-80N RV-100N RV-125N RV-160N RV-380N RV-500N RV-700N
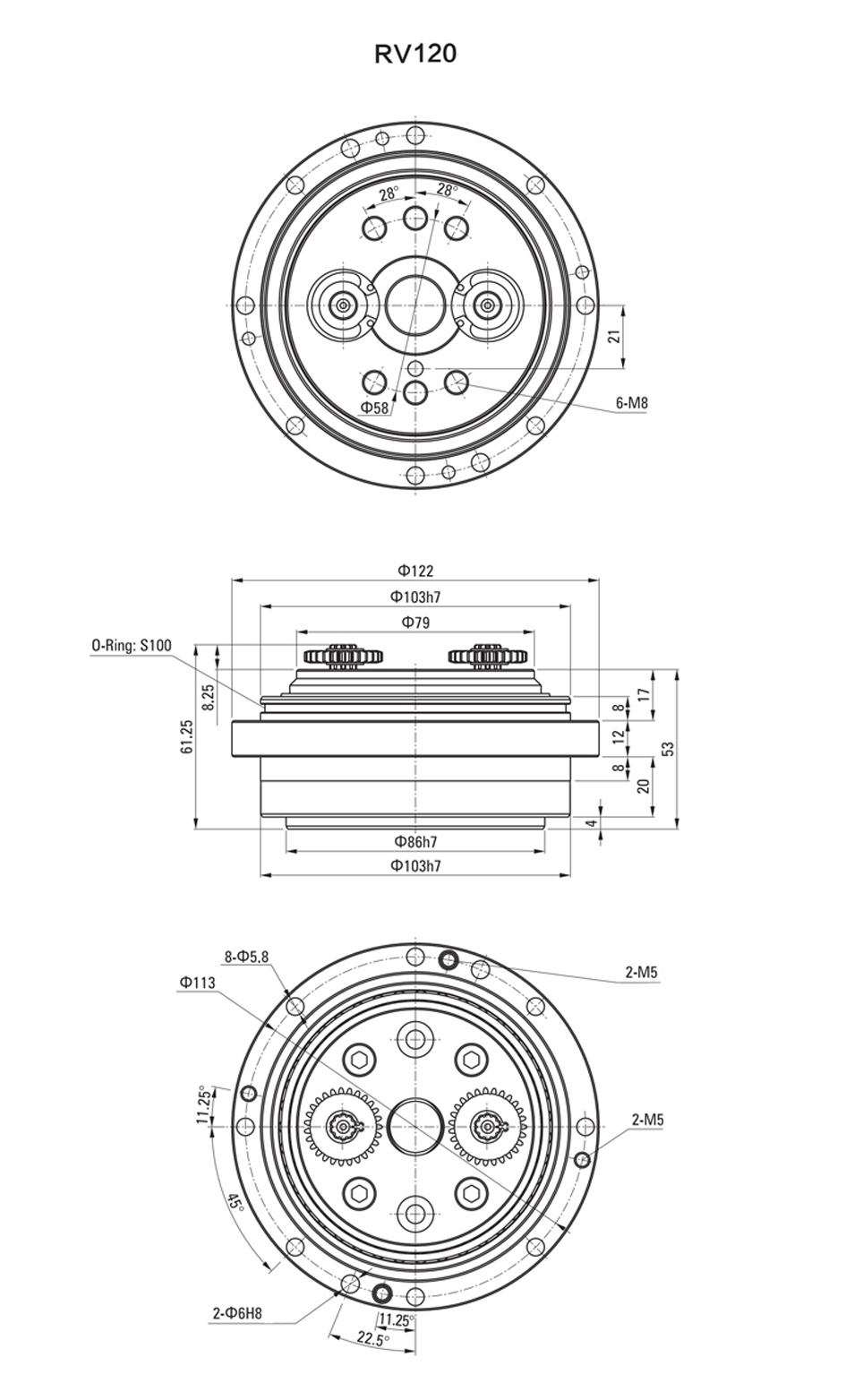
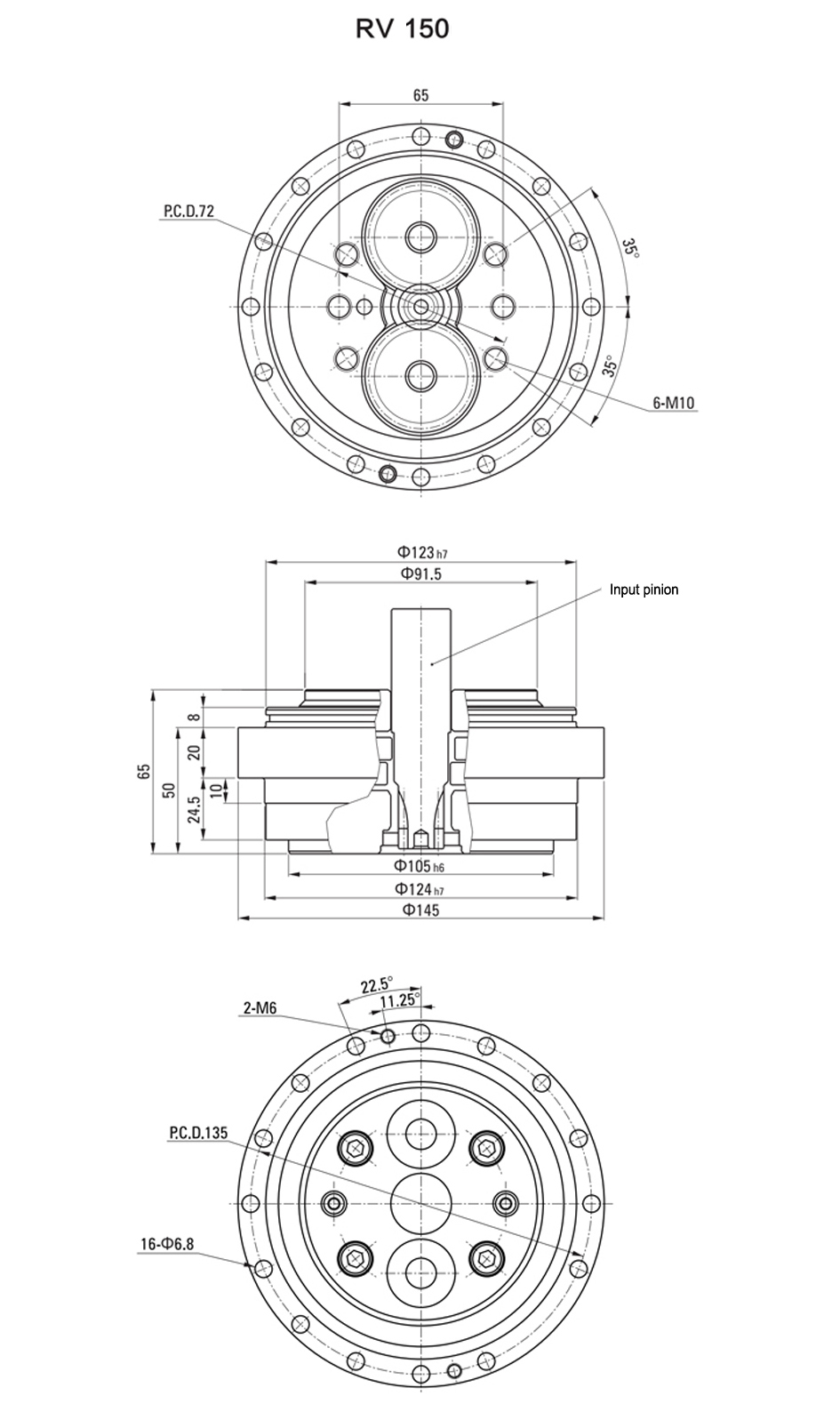
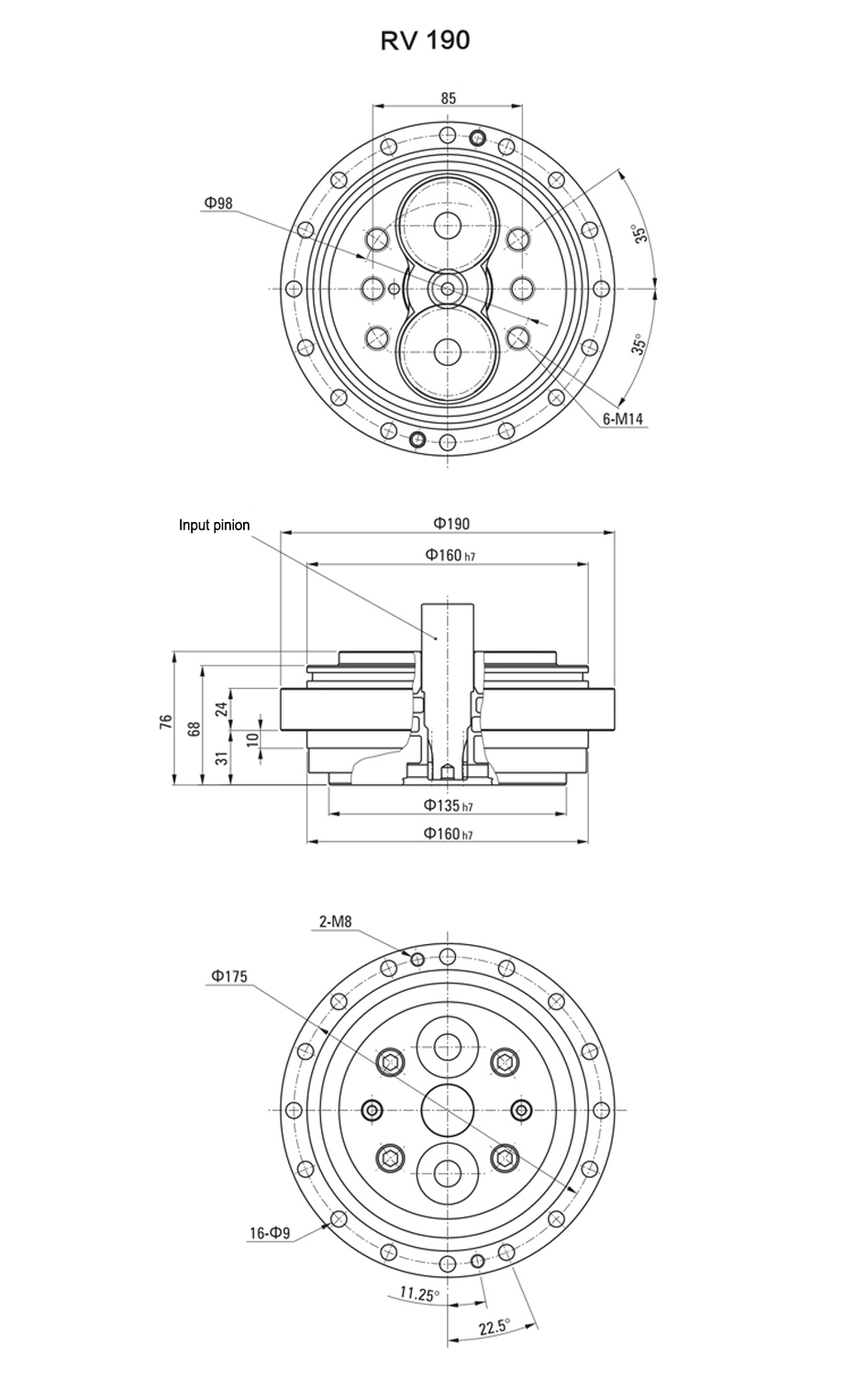
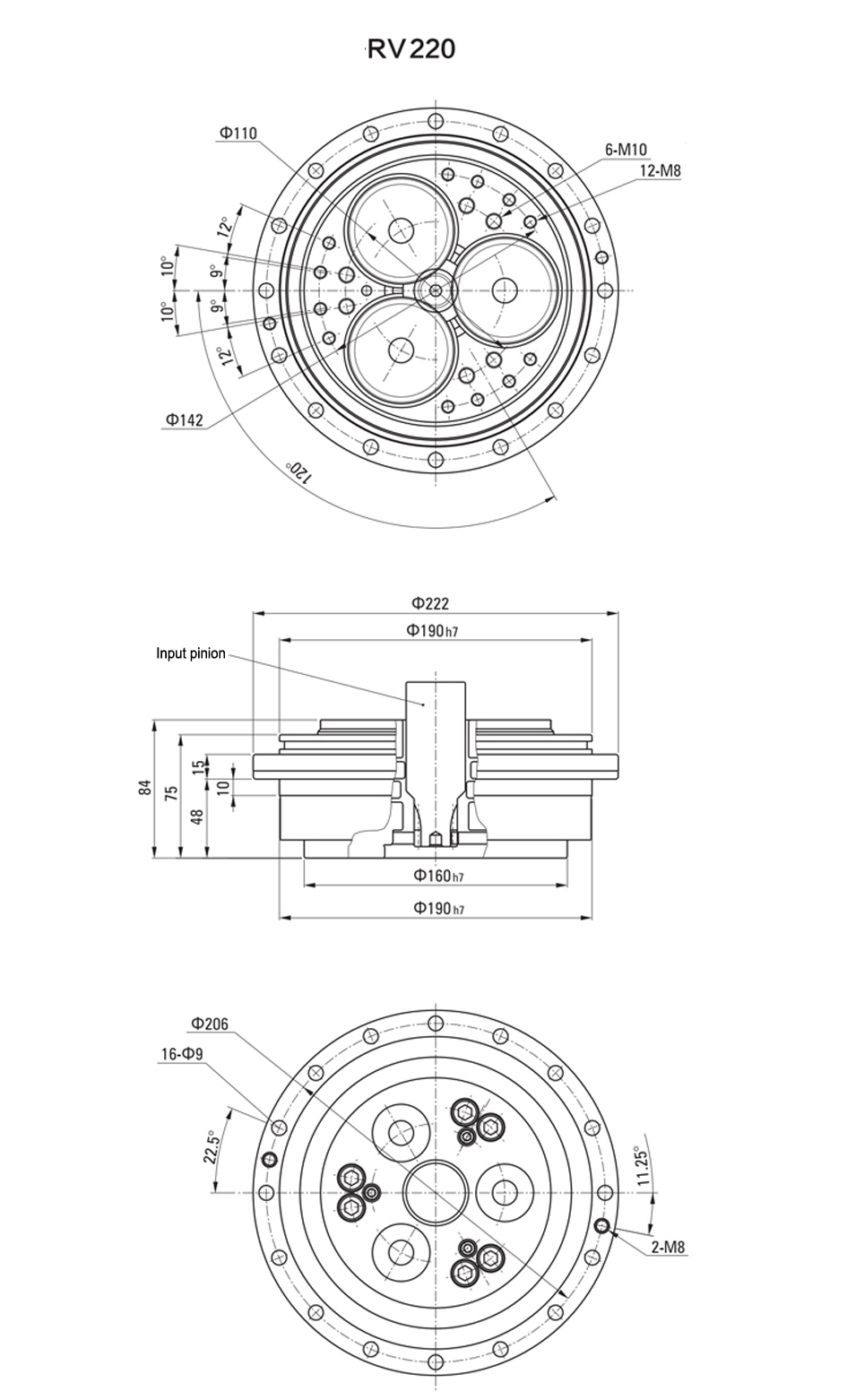
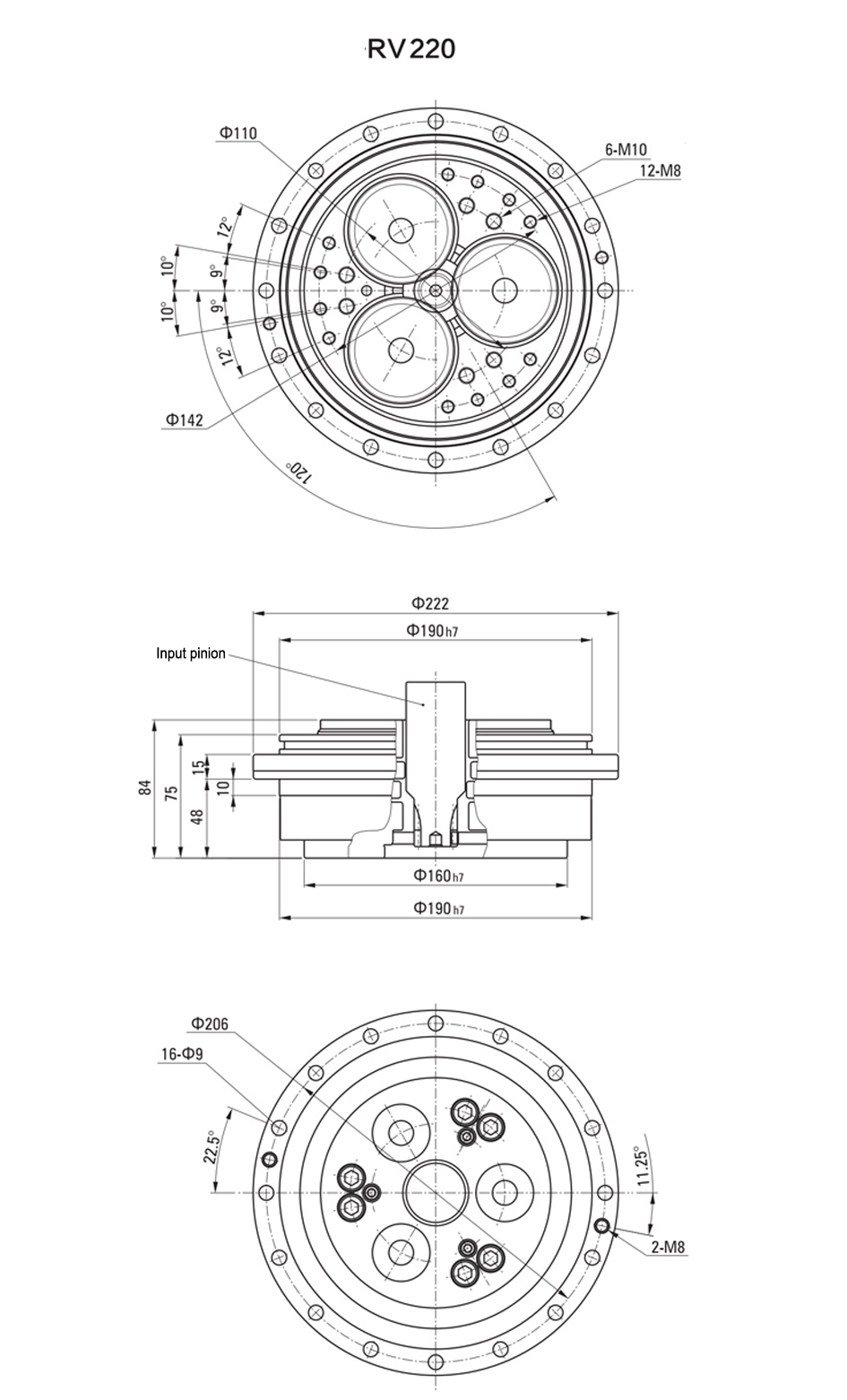
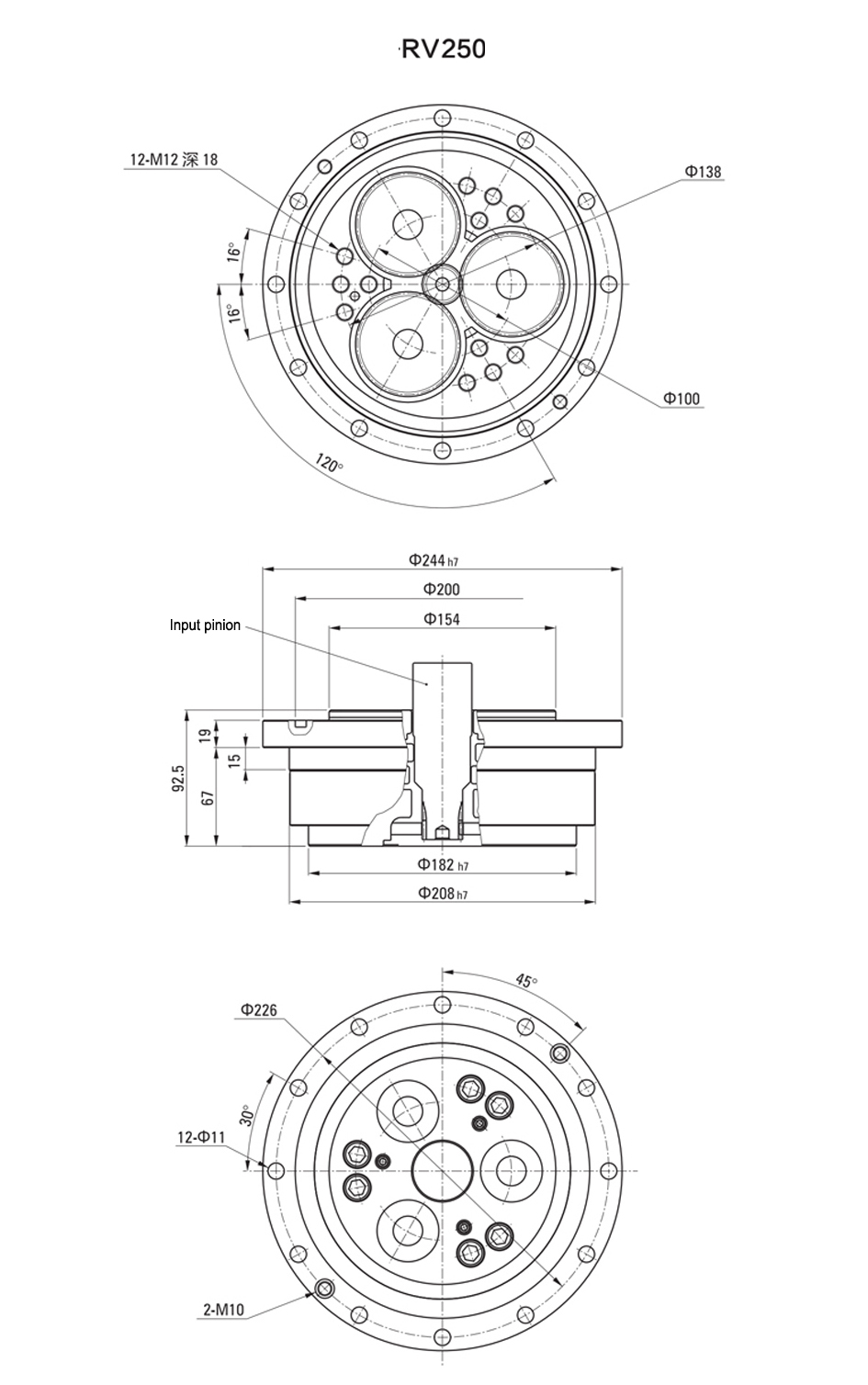
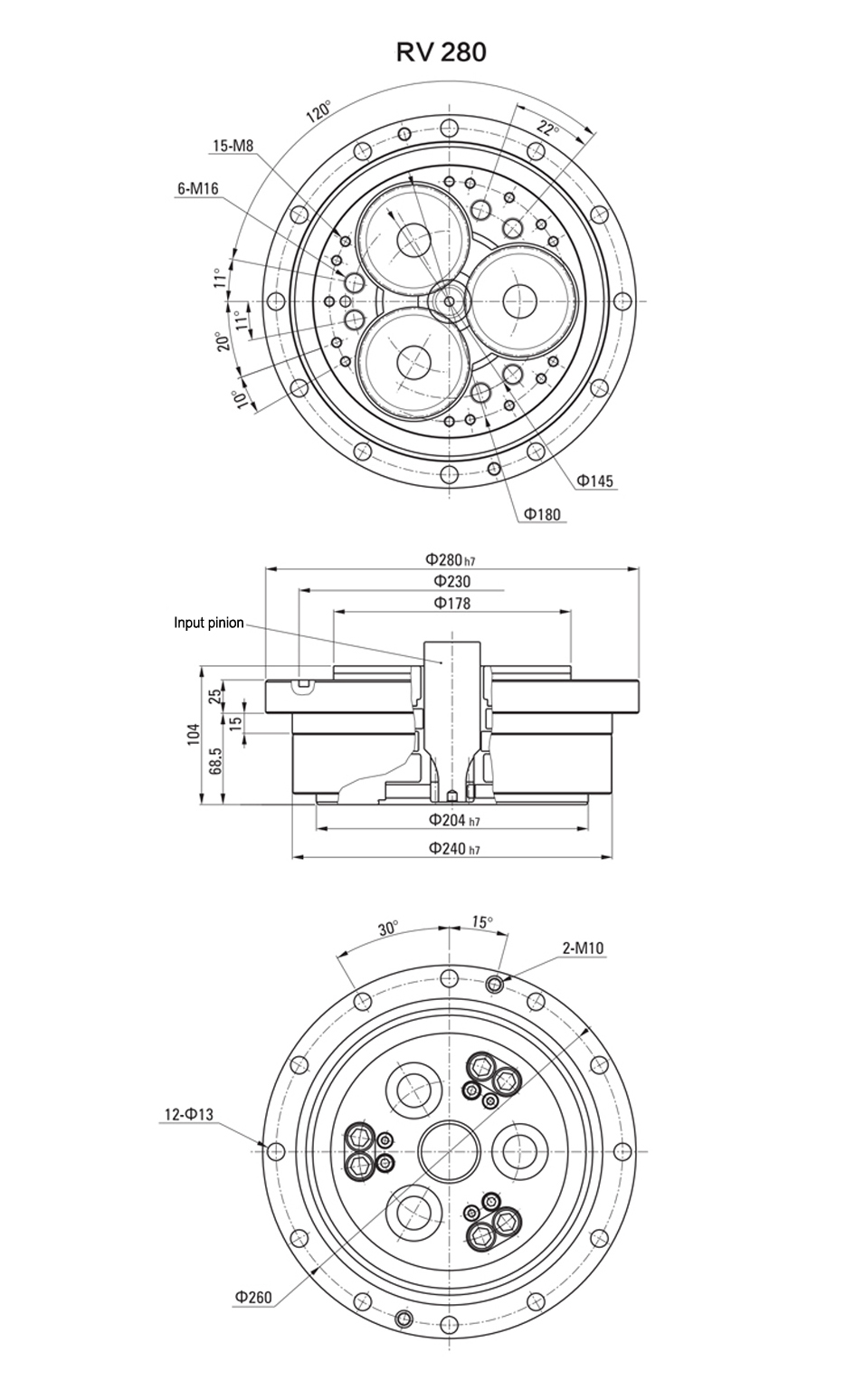
RV120 RV150 RV190 RV220 RV250 RV280
RVE120 RVE150 RVE190 RVE220 RVE250 RVE280
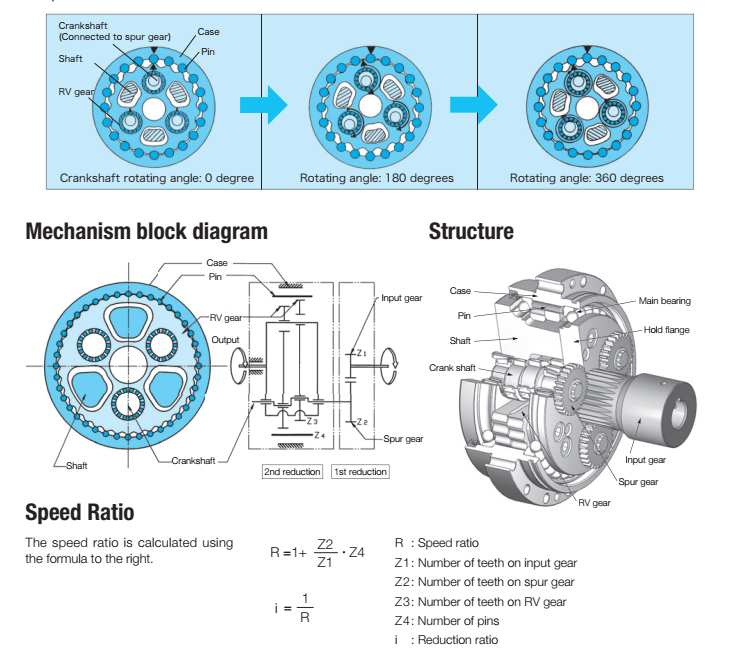
• ลดเกียร์เดือยขั้นที่ 1
เกียร์อินพุตทำงานและหมุนเฟืองเดือยที่เชื่อมต่อกับเพลาข้อเหวี่ยง สามารถกำหนดอัตราทดเกียร์โดยรวมได้หลายแบบโดยการเลือกอัตราทดเกียร์ช่วงแรกแบบต่างๆ
การลดเกียร์ Epicyclic ขั้นที่ 2
• เพลาข้อเหวี่ยงที่ขับเคลื่อนด้วยเฟืองเดือยทำให้เกิดการเคลื่อนที่นอกรีตของเกียร์เอพิไซคลิกสองตัวที่เรียกว่าเฟือง RV ซึ่งอยู่ห่างจากกัน 180 องศาเพื่อให้โหลดที่สมดุล
• การเคลื่อนที่แบบนอกรีตของเฟือง RV ทำให้เกิดการมีส่วนร่วมของฟันเฟืองรูปทรงไซโคลิดดัลด้วยหมุดรูปทรงกระบอกที่อยู่รอบขอบด้านในของเคส
• ในหนึ่งรอบการหมุนของเพลาข้อเหวี่ยง ฟันของเฟือง RV จะขยับระยะหนึ่งพินไปในทิศทางตรงกันข้ามกับข้อเหวี่ยงที่หมุนอยู่ การเคลื่อนที่ของเฟือง RV นั้นทำให้ฟันยังคงสัมผัสกับหมุดอย่างใกล้ชิดและฟันหลายซี่แบ่งรับน้ำหนักพร้อมกัน
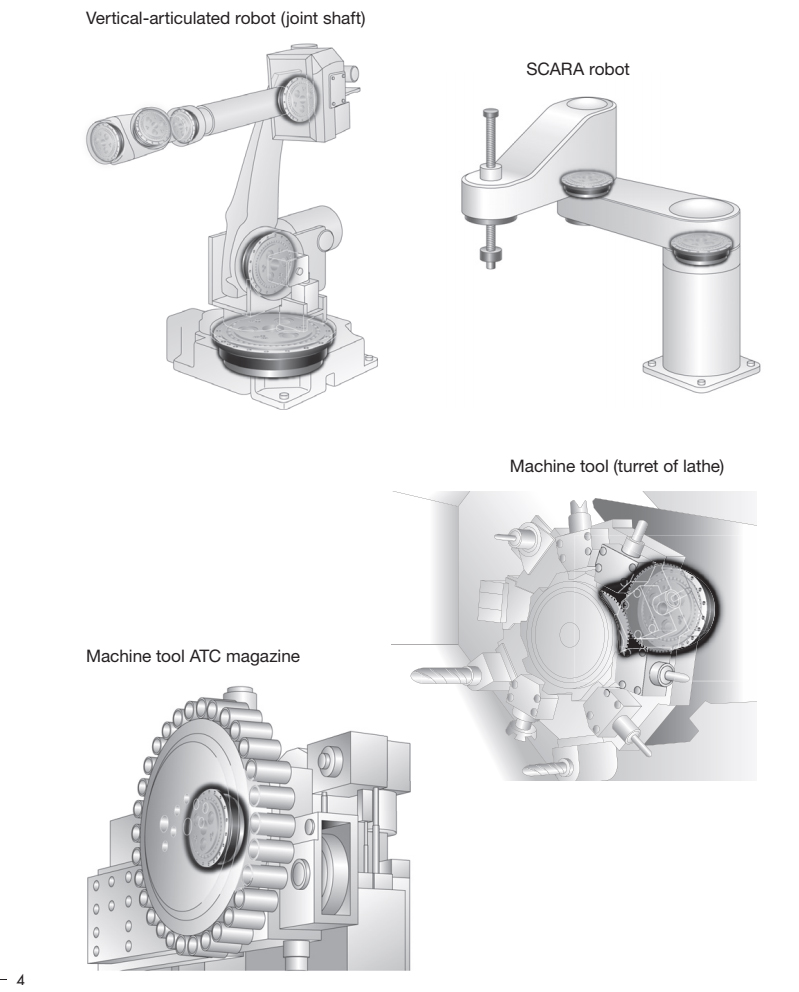
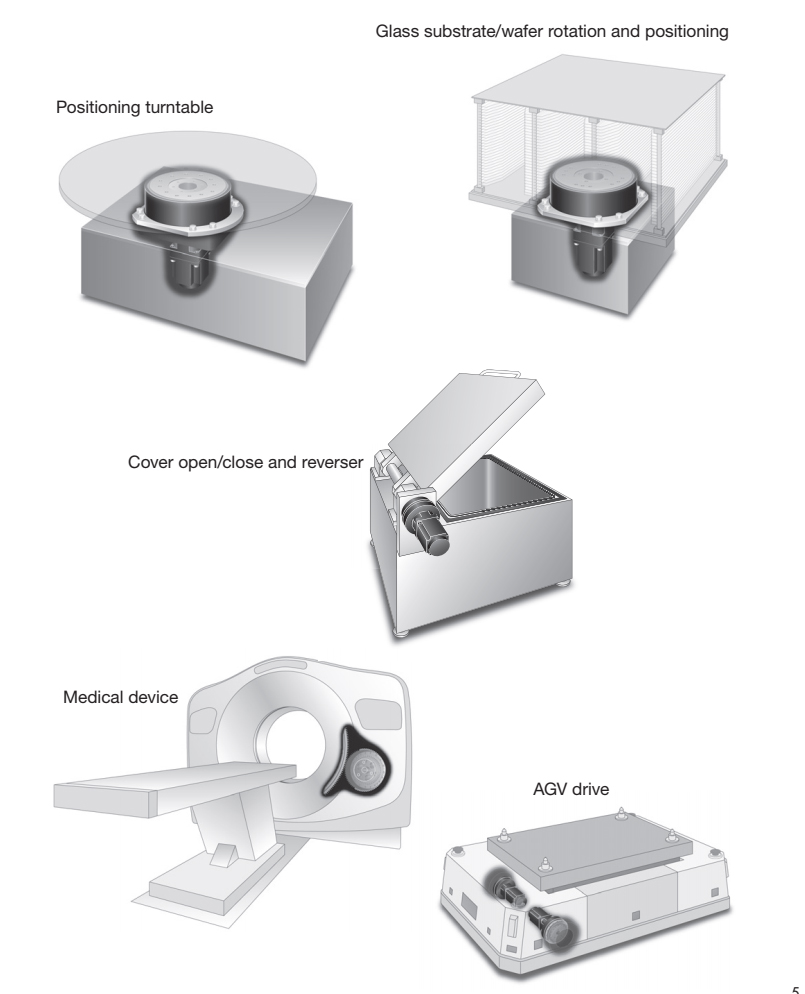
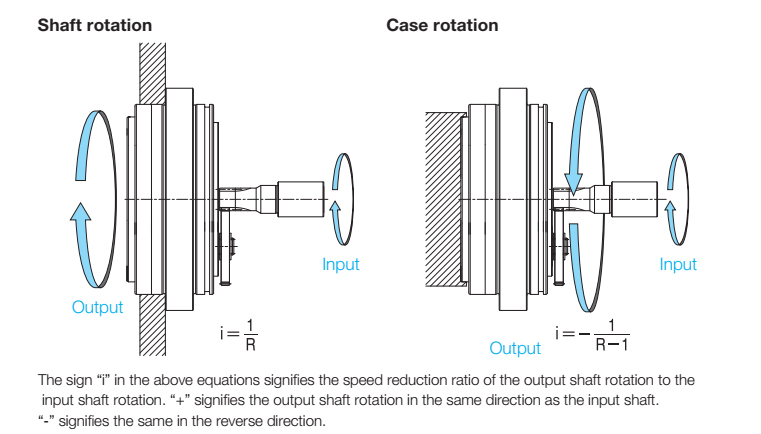
• เอาต์พุตสามารถเป็นได้ทั้งเพลาหรือตัวเรือน หากตัวเรือนได้รับการแก้ไขแล้ว เพลาคือเอาต์พุต หากเพลาได้รับการแก้ไข ตัวเรือนจะเป็นเอาต์พุต
เกียร์ทั้งหมดถูกคาร์บูไรซ์ด้วยโหลดสูง เสียงต่ำ การสั่นสะเทือนต่ำ ความเฉื่อยต่ำ และอายุการใช้งานยาวนาน ความแม่นยำสูงสำหรับการเบี่ยงเบนต่ำในทิศทางการหมุน ต้นทุนต่ำสำหรับการใช้งานทั้งหมด
ทิศทางการหมุนและอัตราทดเกียร์
ปันส่วน: 41 81 102.17 102.81 107.66 125.21 126 137 156 164.07 141 145.61 161 201 171 75 93 117 139 162 185 81 105 123 144 159 192.75 105 118 142.44 159 183 203.52
รหัสสินค้า
อัตราส่วนความเร็วโดยรวม i (ของขั้นตอนการลดครั้งแรกและครั้งที่สอง) จะแตกต่างกันระหว่างการหมุนเพลาและการหมุนเคส และสามารถคำนวณได้จากอัตราส่วนความเร็ว